
“Nowadays, if you get in a car that doesn’t have a backup camera, you notice,” says Dan Balogh, Director of Electronics & Software engineering at Mercury Marine.
The drive assistance functionalities people are becoming used to in their cars – self-parking, lane departure sensors, adaptive cruise control, Balogh says, will soon have them asking for similar functionality in their boats.
Self-parking cars have been around for a decade, but haven’t really taken off – the systems can be slow and most drivers feel confident parking their own car. But even experienced boaters often wish it were easier to park a vessel –one of a boater’s most stressful tasks. Mercury Marine, Raymarine, and Volvo Penta are all working on translating the self-parking car into the self-docking boat.
During last year’s Volvo Ocean Race stopover in Goteborg, Sweden, Volvo-Penta displayed a prototype self-docking system aboard a 68-foot Azimut equipped with Volvo’s existing technology.
This year, Mercury Marine and Raymarine teamed up to display a working prototype, which non-professional captains could test at the Miami Boat Show, that brings similar functionality to outboard-powered boats, driven through Mercury Marine’s existing Joystick docking systems.
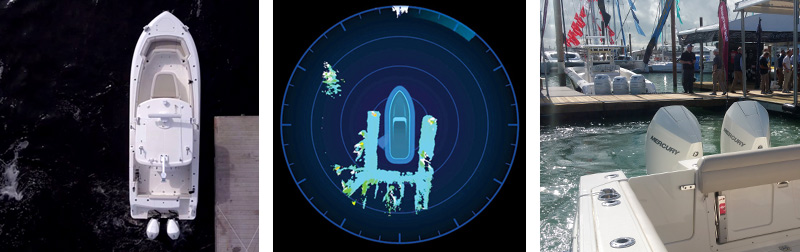
The chosen boat, a Boston Whaler 330 Outrage, was fitted with five Raymarine Stereovision cameras feeding visual and 3D distance data into both Raymarine’s new DockSense system (displayed on the boat’s helm) to help the driver see all surroundings; and into Mercury Marine’s Joystick Piloting for Outboards (JPO) system for control.
The display shows a realistic readout of surrounding objects much like a radar screen, and surrounds the displayed boat with a 3-foot “virtual bumper.” Within that bumper, the JPO system will automatically correct for propwash and detected movement for a drama-free docking experience, with no overcorrections or near-misses.
“The system is designed to hold position or a determined path, so if a wake or some other force pushes the boat too strongly, it counteracts that with micro-inputs from the throttles,” says Balogh. That can result in the boat holding a steady, stopped position even in current, but the system’s inputs are gradual.
“Where a human might be distracted and not notice a pylon until it’s two feet away and then dramatically correct,” Balogh says, “The system sees everything around the boat, including that pylon 20 feet away and automatically slows to keep away, even if there is momentum. It just gradually comes to a rest and doesn’t hit the pylon – a seamless experience.” Right now, the system is only a prototype.
“We started with a center console boat with easy sightlines,” says Balogh, “But the idea is to scale up this concept to larger boats like trawlers where it’s much harder to be aware of all your surroundings.” The system setup is also designed to be flexible. The prototype was fitted with five separate sensors, but different types of boats may require more or fewer depending on size.
The same sensors that allow for this seamless docking and position holding are also likely a harbinger of additional functions, such as better autopilots that can adapt to obstacles and different conditions, Balogh says. There isn’t a timeline for a production version of the system, but Balogh says that the same relatively fast strides that have brought semi-autonomous functions to cars will bring these same systems to production boats by 2021-2022.
“It was great to demonstrate the proof of concept. We wanted to gauge reaction and get a feel for how potential customers would react to it,” he says. “Now we’re in the production engineering phase.”